我们创新的多镜头相机解决方案提供无与伦比的影像能力,实现令人惊豔的180/360度全景、先进的複合影像感测器融合应用,以及精准的深度感测立体影像。

Ability的创新动态拼接技术是影像领域的革命性突破。透过将拼接区域分割成多个较小的区域,我们的算法可以在相机内直接拼接影像,省去繁琐的电脑或应用程式后製过程。
传统拼接技术不但运算缓慢同时造成画面扭曲,影响观看体验。我们的独家动态演算法,能即时分析并校正不同距离物体的视角差异,确保拼接后的画面自然、无缝。
在将多张影像拼接成一张全景图时,如何处理不同影像之间的差异是一个关键的挑战。这些差异主要来自于以下两个方面:
因此,我们需要超越单一影像画质调整,採用更複杂的方法来处理这些差异。
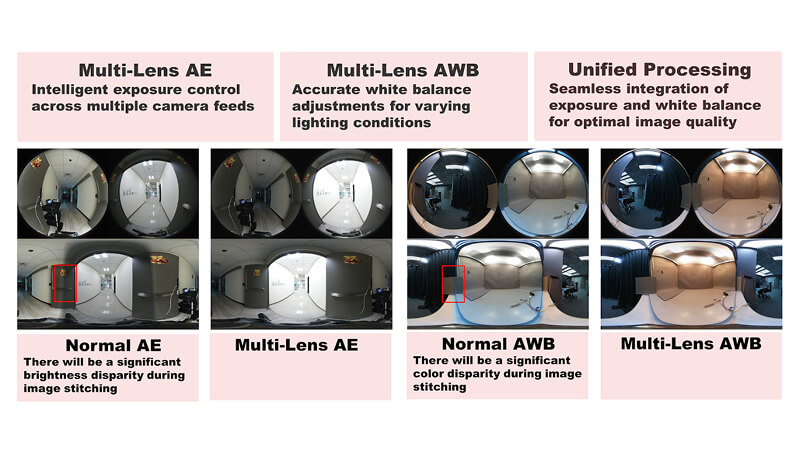
另外,处理影像差异的关键考量如下:
通过仔细处理这些因素,我们可以获得高品质的拼接影像,准确地呈现原始场景。
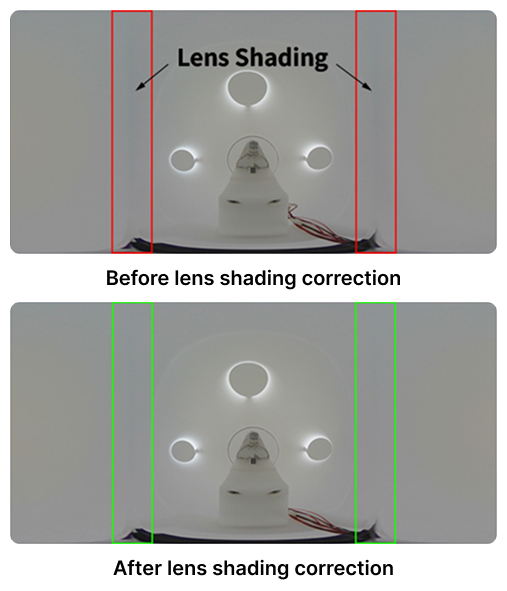
为了解决不同镜头拍摄的影像在边缘亮度不均的问题,我们开发了一套预校正流程。将相机置于一个发出均匀光亮的积分球内,我们可以精准测量并补偿这些亮度差异。
透过实施这项预校正流程,我们可以在降低整体成本和提高生产灵活性的同时,提供高品质的拼接全景图。
我们的水平稳定算法利用惯性测量单元(IMU)的数据,对影像感测器影像进行防抖补偿。通过分析IMU的数据,我们可以准确地确定相机的方位,并对影像帧进行适当的校正。
我们的滚动快门校正算法利用惯性测量单元(IMU)的数据,以有效降低CMOS感测器中滚动快门所造成的果冻效应。通过分析IMU的加速度和角速度数据,我们可以准确地计算相机的运动轨迹,并对撷取的影像进行适当的校正。
透过将滚动快门校正整合至影像系统中,可提升影像品质、减少失真,并改善应用整体效能。
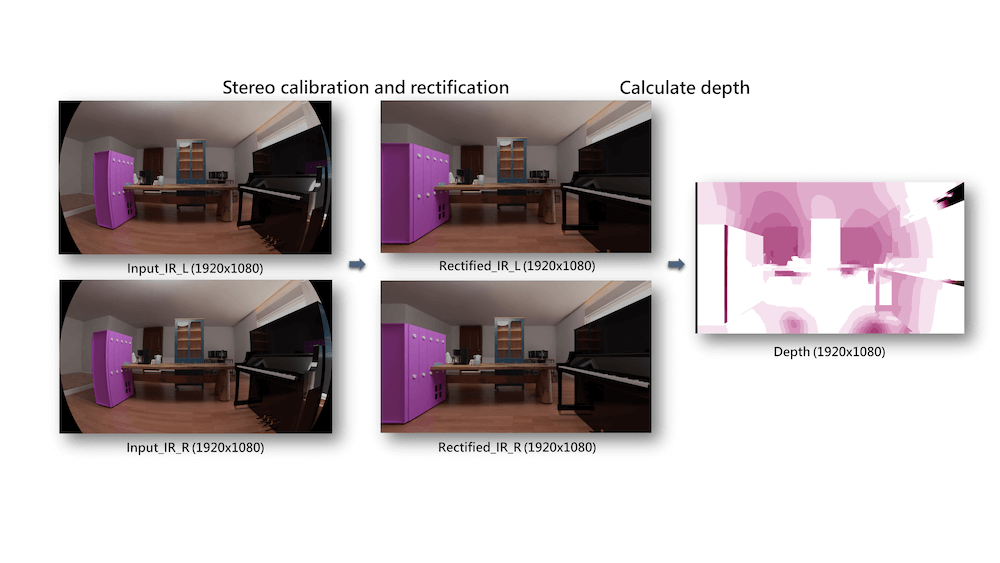
我们的立体深度感测算法包含两个关键步骤: